
TS Nguyễn Bê
Hệ thống điều khiển là một bộ phận cấu thành của hệ thống tự động có chức năng phát ra các lệnh để cho hệ thống hoạt động theo yêu cầu công nghệ đề ra. Con người là hệ thống tự động hoàn chỉnh có hệ thống điều khiển là bộ óc (đầu) đưa ra các lệnh để cho cơ cấu chấp hành là tay chân thực hiện.
Đối với tầm quốc gia, hệ thống điều khiển được hiểu là bộ máy lãnh đạo của một triều đại.
Có thể mô tả hoạt động của một con người như sau: khi nhận được yêu cầu từ bên ngoài hoặc tự bản thân, bộ óc sẽ phát ra một lệnh để cho tay hoặc chân hoặc cả hai thực hiện hành động theo yêu cầu.

Ví dụ thực hiện việc quét nhà theo yêu cầu của mẹ. Sau khi nhận lệnh từ mẹ trong đầu của con sẽ sinh ra lệnh “quét” cho tay chân thực hiện. Sơ đồ khối tổng quát của hệ thống được mô tả trên hình 1.
Nếu thực hiện như hình 1 thì cơ cấu chấp hành sẽ làm việc mãi mãi không có lúc dừng. Hệ thống trên trong kỹ thuật được gọi là hệ thống hở. Hệ thống này là hệ chưa hoàn chỉnh, không thể hoạt động tự động được.
Ví dụ như bạn cho con bạn đi học nhưng không bao giờ đến trường học của con, không họp phụ huynh để nghe cô giáo phản hồi về việc học của con thì kết quả học tập của con bạn rất dễ có vấn đề.
Hệ thống phải dừng làm việc khi nhà đã quét xong. Khi quét xong, một tín hiệu “ xong” báo về, lúc đó hệ thống điều khiển ra lệnh dừng hoạt động của cơ cấu chấp hành. Sơ đồ khối của hệ thống này có thêm một khâu nữa là khâu phản hồi hoặc hồi tiếp lấy tín hiệu từ đối tượng đưa về hệ thống điều khiển. Hệ thống này là hệ thống kín, sơ đồ khối được mô tả trên hình 2

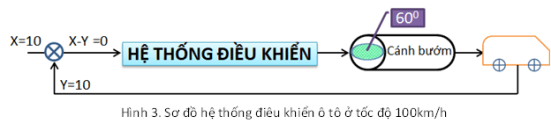
Minh họa bằng việc giữ ổn định tốc độ của một ô tô ở chế độ “Control”. Giả sử giá trị yêu cầu (được số hóa) X=10, hệ thống điều khiển phát lệnh để cánh bướm điều khiển lượng hỗn hợp nhiên liệu – khí mở một góc 600, xe đạt tốc độ 100km/h, giá trị phản hồi đo tốc độ thực của ô tô (được số hóa) Y= 10, sai lệch X-Y=0, hệ thống điều khiển không phát lệnh đóng mở thêm/bớt, cánh bướm vẫn giữ nguyên góc 600
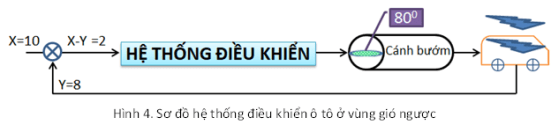
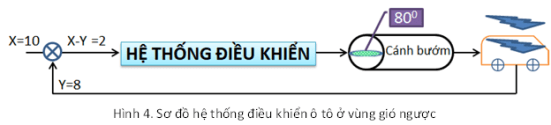
Đến một lúc xe chạy vào vùng có gió ngược làm tốc độ thực của xe giảm xuống còn 80km/h. Lúc này tín hiệu phản hồi giảm xuống Y=8, sai lệch X-Y=2, hệ thống điều khiển phát lệnh cho cánh bướm mở thêm đến góc mở 800để tăng hỗn hợp nhiên liệu – khí vào làm tốc độ động cơ tăng về giá trị 100km/h
Một lúc khác xe chạy vào vùng thuận gió, tốc độ thực của xe tăng lên 120km/h, tín hiệu phản hồi tăng lên Y=12, sai lệch X-Y=-2, hệ thống điều khiển phát lệnh cho cánh bướm đóng bớt lại đến góc 400, hỗn hợp nhiên liệu – khí giảm xuống để giảm tốc về 100km/h
Qua ví dụ trên, ta thấy rằng hệ thống tự động luôn giữ nguyên tốc độ cho xe mà không có sự can thiệp của con người. Cách điều khiển theo kiểu này gọi là điều khiển theo tỉ lệ
Đối với những hệ thống tự động có cấu trúc phức tạp, quán tính lớn ví dụ như hệ thống ổn định nhiệt độ trong các nhà máy thực phẩm, yêu cầu sai lệch nhiệt độ bé (± 0,50C) thì ngoài việc điều khiển theo tỉ lệ còn phải phối hợp thêm điều khiển theo tích phân và vi phân. Sự phối hợp này luôn lấy khâu tỉ lệ làm chính nghĩa là sẽ có bộ điều khiển vi phân – tỉ lệ, tích phân – tỉ lệ hoặc vi tích phân – tỉ lệ.
- Bộ điều khiển PID
Theo https://vi.wikipedia.org/wiki/B%E1%BB%99_%C4%91i%E1%BB%81u_khi%E1%BB%83n_PID
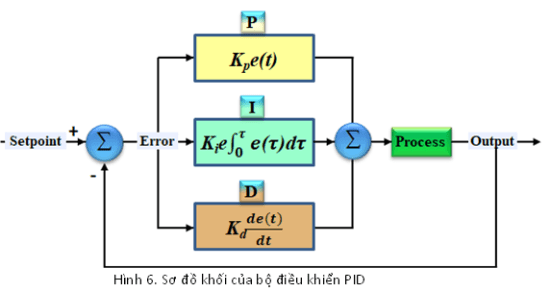
“Bộ điều khiển vi tích phân tỉ lệ (bộ điều khiển PID- Proportional Integral Derivative) là một cơ chế phản hồi vòng điều khiển (bộ điều khiển) tổng quát được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp; bộ điều khiển PID là bộ điều khiển được sử dụng nhiều nhất trong các bộ điều khiển phản hồi.”
“Giải thuật tính toán bộ điều khiển PID bao gồm 3 thông số riêng biệt, do đó đôi khi nó còn được gọi là điều khiển ba khâu: các giá trị tỉ lệ, tích phân và đạo hàm, viết tắt là P, I, và D. Giá trị tỉ lệ xác định tác động của sai số hiện tại, giá trị tích phân xác định tác động của tổng các sai số quá khứ, và giá trị vi phân xác định tác động của tốc độ biến đổi sai số. Tổng chập của ba tác động này dùng để điều chỉnh quá trình thông qua một phần tử điều khiển như vị trí của van điều khiển hay bộ nguồn của phần tử gia nhiệt. Nhờ vậy, những giá trị này có thể làm sáng tỏ về quan hệ thời gian: P phụ thuộc vào sai số hiện tại, I phụ thuộc vào tích lũy các sai số quá khứ, và D dự đoán các sai số tương lai, dựa vào tốc độ thay đổi hiện tại.” Các đánh giá PID theo wiki có thể tóm tắt như bảng 1
| Bộ điều khiển | Ý nghĩa giá trị | Quan hệ thời gian | Tác động |
| P(Proportional) | Sai số hiện tại | Hiện tại | Theo quá trình |
| I(Integral) | Sai số quá khứ | Quá khứ | Chậm quá trình |
| D(Derivative) | Tốc độ biến đổi sai số | Tương lai | Nhanh quá trình |
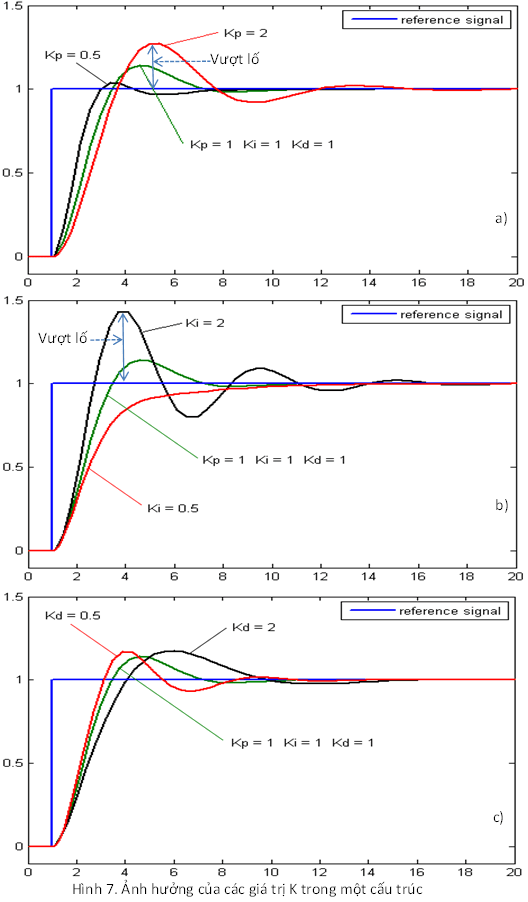
Bộ điều khiển PID được hiểu như một ban lãnh đạo gồm 3 người: P là người hiểu biết những vấn đề hiện tại, có nhiệm vụ đưa hệ thống về giá trị ổn định, làm nhân vật chính trong bộ máy lãnh đạo; I là người có nhiều hiểu biết về quá khứ, thận trọng trong xử lý nên quá trình tiến đến giá trị ổn định có chậm nhưng không vượt lố; D là người nhanh nhẹn tháo vát, tác động ngay khi có dấu hiệu của sự biến động (dự đoán được sự biến động của hệ thống) nên làm cho quá trình tiến nhanh đến giá trị ổn định nhưng dễ xảy ra hiện tượng vượt lố. (hình 7)
Chỉ với cấu trúc như ở hình 6, bộ PID được sử dụng để điều khiển nhiều hệ thống tự động khác nhau như điều khiển nhiệt độ, điều khiển tốc độ …với yêu cầu sai số bé. Khác biệt các bộ PID ở các hệ thống khác nhau đó là bộ số Kp, Ki, Kd; đây là những hệ số phụ thuộc vào cấu trúc của mỗi hệ thống tự động, nghĩa là ở hệ thống có cấu trúc khác nhau, các bộ số Kp, Ki, Kd khác nhau. Tính toán các hệ số này thuộc lĩnh vực chuyên môn của ngành tự động.
Chính trong một hệ thống, lựa chọn các hệ số khác nhau cho ta các kết quả khác nhau được ví dụ trên hình 7, lấy đường cong có Kp=1, Ki=1, Kd=1 làm chuẩn. Trên hình 7a, Kp= 2 làm cho hệ thống vượt lố khoảng 25% (đường màu đỏ), Kp= 0,5 là tốt nhất (đường màu đen).
Trên hình 7b, Ki= 2 làm cho hệ thống vượt lố khoảng 40% (đường màu đen), Ki= 0,5 làm hệ thống chậm tiến đến ổn định nhưng không vượt lố (đường màu đỏ).
Trên hình 7c, Kd= 2 làm cho hệ thống vượt lố khoảng 20% (đường màu đen), quá trình ổn định chậm hơn so với Kd= 0,5 (đường màu đỏ).
Những kết quả trên cho ta thấy một trong những giá trị K quá lớn đều không tối ưu và sự phối hợp 3 khâu hay mức độ ảnh hưởng lẫn nhau của 3 khâu này phụ thuộc vào cấu trúc của hệ thống mà nó điều khiển.
Ví dụ một cơ quan lập kế hoạch thì ảnh hưởng của người có kinh nghiệm phải lớn hơn người mới vào nghề, thậm chí là không cần nên có thể sử dụng hệ PI hoặc PID, ở cơ quan phòng cháy chữa cháy thì ảnh hưởng của người nhanh nhẹn, tháo vát là cần thiết hơn những con rùa cạo giấy nên có thể sử dụng hệ PD hoặc PID; nhưng cầm chịch vẫn là những con người P có khả năng nắm bắt những vấn đề của thực tế, người của thì hiện tại hơn là người của thì quá khứ và thì tương lai.
- Phép ánh xạ từ điều khiển học vào thực tế
Phần trình bày ở trên là một phần của lĩnh vực điều khiển học, kiến thức cần thiết cho rất nhiều ngành kỹ thuật. Nó chỉ ra tính chất các khâu của hệ thống điều khiển PID, mối quan hệ các khâu với thời gian cũng như đáp ứng các khâu này khi nhận tín hiệu đầu vào. Thực tế cũng có những bộ điều khiển PD, PI đủ đáp ứng yêu cầu điều khiển tương ứng với tính chất của hệ thống tự động.
Có thể làm một phép ánh xạ từ điều khiển học vào thực tế để tổ chức một bộ máy lãnh đạo cho một đơn vị. Tổ chức một bộ máy theo PID cần ba nhóm:
– Nhóm tỉ lệ: cần những con người có hiểu biết thực tế, phân tích những hiện tượng đang xảy ra, là những người của hiện tại đáp ứng đủ yêu cầu chuyên môn của chính đơn vị mình phụ trách
– Nhóm tích phân: cần những con người có hiểu biết quá khứ, biết phân tích những hiện tượng đã diễn ra trong qúa khứ.
– Nhóm vi phân: cần những con người nhanh nhẹn, dự đoán các tình huống sắp xảy ra, đáp ứng tức thời các tình huống đó trong thực tế.
Hai nhóm này làm tham mưu cho nhóm tỉ lệ và mức độ ảnh hưởng của nó phụ thuộc vào tính chất của từng đơn vị.
- Các yếu tố ảnh hưởng
Như đã trình bày ở trên, hệ thống phản hồi vòng kín là hệ thống tối ưu đáp ứng được nhiều yêu cầu điều khiển của hệ thống phức tạp của kỹ thuật cũng như của tổ chức xã hội. Chỉ cần một khâu, một yếu tố trong khâu phản hồi làm việc không đúng chức năng có thể chuyển từ một hệ thống kín hoàn chỉnh thành một hệ thống hở không đáp ứng đúng yêu cầu thiết kế đề ra. Một vài nguyên nhân phổ biến:
– Đảo ngược vai trò: thực tế mọi người đều thích đóng vai trò P hơn là I, D bất chấp bản thân có khả năng hay không. Điều này dẫn đến hệ lụy là phản ứng chậm hoặc quá bộp chộp trước những biến động của hệ thống.
Trong kỹ thuật, thiết kế các khâu P, I, D rất đơn giản, chỉ cần nối tiếp hoặc song song một điện trở (R), tụ điện (C) hoặc mạch RC để có các khâu PID tương ứng. Trong khâu nhân sự, việc tìm đúng những con người có tố chất cần thiết là việc làm khó, đôi khi vì muốn ở khâu P nhưng quá cẩn thận, tỉ mỉ, chậm chạp làm cho hệ thống tác động chậm, nhiều kết quả không còn cần thiết hoặc một người nóng nảy, bộc trực ở vị trí P có thể phá vỡ hệ thống khi dự đoán không chính xác các biến động của hệ thống.
– Hệ thống phản hồi chậm, không chính xác. Vì nhiều lý do, các giá trị phản hồi về không đúng với giá trị thực của nó làm cho hệ thống điều chỉnh không chính xác dẫn đến sai số lũy tiến, tiến đến phá vỡ hệ thống.
Rất nhiều nghị quyết được phát ra nghĩa là cơ cấu chấp hành đã làm việc, nhưng hệ thống thu thập và đánh giá thông tin thực thi chậm đến lúc đưa về hệ thống điều khiển không còn tác dụng với thực tế. Nhiều khâu phản hồi mới dừng lại ở đánh giá, rút kinh nghiệm thì hệ thống kín đã biến thành một hệ thống hở. Nên nhớ là khi hệ thống điều khiển phát lệnh, cơ cấp chấp hành thực thi thì khâu phản hồi phải thu nhận thông tin (đôi lúc phải lọc vì nhiễu) đưa về hệ thống điều khiển. Hoạt động của hệ thống điều khiển lúc này là điều chỉnh lại hoạt động của cơ cấu chấp hành đảm bảo bám đúng yêu cầu đặt ra ban đầu.
- Kết luận
Toán học là công cụ do con người tạo ra. Các kết quả của toán học hoàn toàn khách quan không phụ thuộc vào sự áp đặt của con người. Phần trình bày các kết quả nghiên cứu PID cho phép ta có thể nghiên cứu tổ chức một bộ máy làm việc hữu hiện đáp ứng đúng yêu cầu thực tế đề ra.
